Giải bài tập Chuyên đề Tin học 10 Bài 12: Thực hành điều khiển robot trên sa bàn
Nhiệm vụ 1 trang 55 chuyên đề học tập Tin học 10: Yêu cầu: Lập chương trình điều khiển robot đi một vòng quang sa bàn theo chiều ngược kim đồng hồ, xuất phát từ vị trí Bắt đầu và dừng tại vị trí Kết thúc.
Trả lời:
Chuẩn bị: Sa bàn, robot có gắn thành phần động cơ, cảm biến dò đường.
Thực hiện: Trong thực tế, khi được cấp cùng một nguồn hoạt động thì các động cơ DC vẫn không xoay với tốc độ bằng nhau do giữa chúng tồn tại chênh lệch về tốc độ xoay. Do vậy, em có thể điều chỉnh tốc độ của từng động cơ với các mức chênh lệch tốc độ khác nhau, ví dụ, giữ nguyên tốc độ một động cơ và tăng hoặc giảm tốc độ động cơ còn lại, sau đó chạy thử để kiểm tra kết quả và điều chỉnh cho chính xác.
(Thực hiện trên phần mềm GaraBlock)
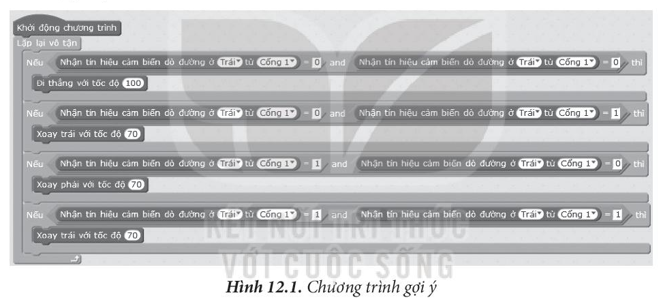
Bước 1. Lập trình cho bốn trường hợp của cảm biến dò đường.
– Trường hợp 1: Khi cả hai mắt tín hiệu cảm biến dò đường cùng nằm trên đường màu đen, em cần lập trình cho robot đi thẳng với tốc độ phù hợp (Hình 12.2)

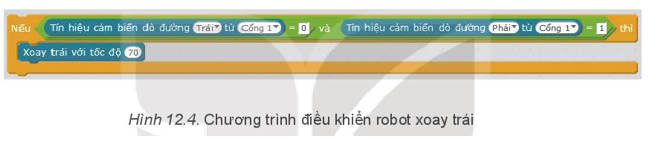
– Trường hợp 2: Khi cảm biến dò đường bị lệch phải, em cần lập trình cho robot xoay trái với tốc độ phù hợp (Hình 12.4)
– Trường hợp 3. Khi cảm biến dò đường bị lệch trái, em cần lập trình cho robot xoay phải với tốc độ phù hợp (Hình 12.5)

– Trường hợp 4. Khi hai mắt tín hiệu cảm biến dò đường cùng nằm trên đường màu trắng, cần lập trình cho robot dừng lại. Ví dụ chương trình trong Hình 12.6

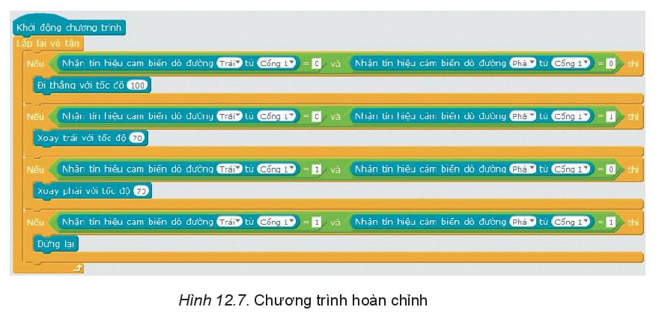
Kết hợp cả 4 trường hợp trên, em sẽ lập được chương trình điều khiển robot sử dụng cảm biến dò đường thực hiện nhiệm vụ 1. Chương trình như Hình 12.7
– Bước 2: Kết nối với robot máy tính và tiến hành nạp chương trình đã lập vào robot.
– Bước 3: Sau khi nạp chương trình thành công, đặt robot vào vị trí bắt đầu trên sa bàn sao cho cả hai mắt của cảm biến dò đường đều nằm trên đường màu đen. Sau đó bấm nút chuyển đến chế độ lập trình với máy tính (vòng LED màu trắng) trên mạch điều khiển của robot và quan sát kết quả, robot sẽ di chuyển từ vị Bắt đầu và tự động dừng lại ở vị trí Kết thúc.
Nhiệm vụ 2 trang 57 chuyên đề học tập Tin học 10: Yêu cầu: Lập chương trình điều khiển robot đi một vòng quanh sa bàn, nếu gặp phải vật cản thì đổi hướng di chuyển.
Trả lời:
Chuẩn bị: Chuẩn bị robot như ở nhiệm vụ 1 và gắn thêm thành phần cảm biến siêu âm.
Thực hiện: Em có thể sử dụng lại chương trình đã lập cho cảm biến dò đường ở nhiệm vụ 1 và lập trình cảm biến siêu âm phát hiện vật cản trong phạm vi 10cm. Khi phát hiện có vật cản trong phạm vi 10cm, robot đổi hướng di chuyển (có thể xoay trái hoặc xoay phải với thời gian hợp lý cho đến khi phát hiện được vạch cơ bản thì tiếp tục đi thẳng)
(Thực hiện trên phần mềm GaraBlock)
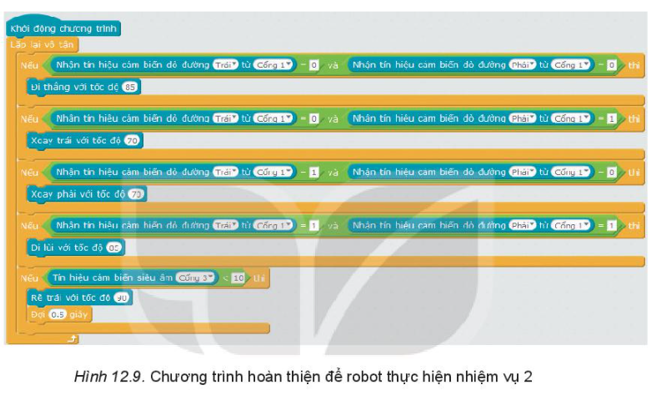
Bước 1. Lập trình kết hợp cảm biến dò đường và cảm biến siêu âm
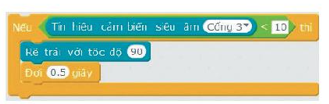
Khi cảm biến siêu âm phát hiện có vật cản trong khoảng 10cm, robot sẽ xoay trái trong khoảng thời gian 1 giây (thời gian có thể tùy chỉnh nếu cần) đến khi gặp phải kẻ đường thì tiếp tục di chuyển theo vạch kẻ đường. Ví dụ trong Hình 12.8:
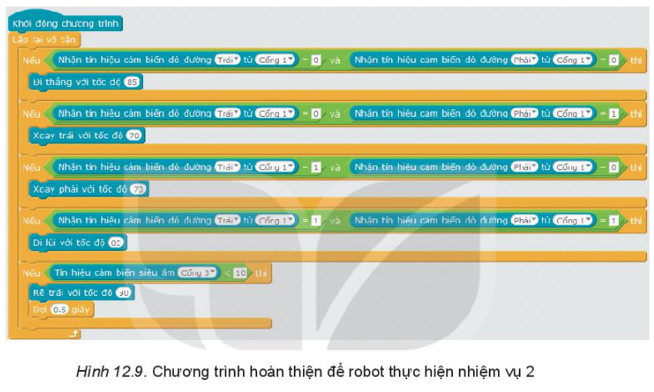
Chương hoàn thiện để robot thực hiện nhiệm vụ 2 như sau:
Bước 2. Kết nối robot với máy tính và tiến hành nạp chương trình đã lập vào robot.
Bước 3. Sau khi nạp chương trình thành công, đặt robot vào vị trí Bắt đầu và vật cản vào vị trí A hoặc B trên sa bàn. Sau đó bấm nút chuyển chế độ lập trình với máy tính và quan sát kết quả. Robot sẽ di chuyển từ vị trí Bắt đầu và tự động dừng lại khi gặp vật cản trong khoảng 10cm, khi lấy vật cản ra khỏi phạm vi 10cm thì robot tiếp tục di chuyển và sẽ dừng lại khi tiếp tục gặp vật cản trong khoảng 10cm.
Luyện tập trang 58 chuyên đề học tập Tin học 10: Em hãy lập chương trình điều khiển robot di chuyển trên sa bàn, xuất phát từ vị trí Bắt đầu đến vị trí Kết thúc thì quay lại vị trí Bắt đầu. Lưu ý: robot không dừng lại mà di chuyển liên tục từ vị trí Bắt đầu đến vị trí Kết thúc và ngược lại.
Trả lời:
Chương trình có thể như sau:
Vận dụng trang 58 chuyên đề học tập Tin học 10: Em hãy lập chương trình điều khiển robot di chuyển trên sa bàn, khi gặp vật cản thì dừng lại trong 3 giây sau đó đổi hướng di chuyển.
Trả lời:
Chương trình tương tự như trình trình ở nhiệm vụ 2, nhưng bổ sung thêm 2 câu lệnh Dừng lại và Đợi 3 giây ở phía trước câu lệnh xoay trái khi phát hiện vật cản.
Xem thêm các bài giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Bài 10: Điều khiển robot nhận biết vật cản
Bài 11: Dẫn đường tự động cho robot
Bài 13: Lập trình điều khiển một số phụ kiện
Bài 14: Thực hành: Dự án điều khiển robot trên sa bàn