Mời các quý thầy cô và các em học sinh cùng tham khảo và tải về chi tiết tài liệu dưới đây
Phân loại và phương pháp giải bài tập hàm số lượng giác và phương trình lượng giác
Chương I. Hàm số lượng giác và phương trình lượng giác
Bài 1. Hàm số lượng giác
A. Lý thuyết
I – Đinh nghĩa
1) Hàm số sin
Quy tắc đặt tương ứng với mỗi số thực x với số thực sinx
\(\begin{array}{l}\sin x:\mathbb{R} \to \mathbb{R}\\x \mapsto y = \sin x\end{array}\)
được gọi là hàm số sin, kí hiệu là y= sinx.
Tập xác định của hàm số sin là \(\mathbb{R}\).
2) Hàm số côsin
Quy tắc đặt tương ứng với mỗi số thực x với số thực cos
\(\begin{array}{l}\cos x:\mathbb{R} \to \mathbb{R}\\x \mapsto y = \cos x\end{array}\)
được gọi là hàm số sin, kí hiệu là \(y = \cos x\).
Tập xác định của hàm số cô sin là \(\mathbb{R}\).
3) Hàm số tang
Hàm số tang là hàm số được xác định bởi công thức \(y = \frac{{\sin x}}{{\cos x}}\quad (\cos x \ne 0)\), kí hiệu là \(y = \tan x.\)
Tập xác định của hàm số \(y = \tan x\) là \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{\pi }{2} + k\pi ,k \in \mathbb{Z}} \right\}\).
4) Hàm số côtang
Hàm số côtang là hàm số được xác định bởi công thức \(y = \frac{{\cos x}}{{\sin x}}\quad (\sin x \ne 0)\), kí hiệu là \(y = \cot x.\)
Tập xác định của hàm số \(y = \cot x\) là \({\rm{D}} = \mathbb{R}\backslash \{ k\pi ,k \in \mathbb{Z}\} \).
II – Tính tuần hoàn và chu kì của hàm số lựợng giác
1) Định nghĩa
Hàm số y = f(x) có tập xác định D được gọi là hàm số tuần hoàn, nếu tồn tại một số \(T \ne 0\) sao cho với mọi \(x \in {\rm{D}}\) ta có:
– \(x – T \in {\rm{D}}\) và \(x + T \in {\rm{D}}\).
– \(f(x + T) = f(x)\).
Số dương T nhỏ nhất thỏa mãn các tính chất trên được gọi là chu kì của hàm số tuần hoàn đó.
Người ta chứng minh được rằng hàm số \(y = \sin x\) tuần hoàn với chu kì \(T = 2\pi \); hàm số \(y = \cos x\) tuần hoàn với chu kì \(T = 2\pi \); hàm số \(y = \tan x\) tuần hoàn với chu kì \(T = \pi \); hàm số \(y = \cot x\) tuần hoàn với chu kì \(T = \pi \).
2) Chú ý
– Hàm số \(y = \sin (ax + b)\) tuần hoàn với chu kì \({T_0} = \frac{{2\pi }}{{|a|}}\).
– Hàm số \(y = \cos (ax + b)\) tuần hoàn với chu kì \({T_0} = \frac{{2\pi }}{{|a|}}\).
– Hàm số \(y = \tan (ax + b)\) tuần hoàn với chu kì \({T_0} = \frac{\pi }{{|a|}}\).
– Hàm số \(y = \cot (ax + b)\) tuần hoàn với chu kì \({T_0} = \frac{\pi }{{|a|}}\).
– Hàm số \(y = {f_1}(x)\) tuần hoàn với chu kì \({T_1}\) và hàm số \(y = {f_2}(x)\) tuần hoàn với chu kì \({T_2}\) thì hàm số \(y = {f_1}(x) \pm {f_2}(x)\) tuần hoàn với chu kì \({T_0}\) là bội chung nhỏ nhất của \({T_1}\) và \({T_2}\).
Lưu ý 2 số thực không xác đinh được bội chung nn, nên là \({T_0} = m{T_1} = n{T_2}\) với m, n là 2 số tự nhiên nguyên tố cùng nhau)
III. Sự biến thiên và đồ thị của hàm số lượng giác
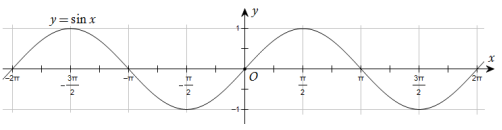
1. Hàm số y = sinx
– Tập xác định D = R, có nghĩa và xác định với mọi \(x \in \mathbb{R}\);
– Tập giá trị \(T = [ – 1;1]\), có nghĩa \( – 1 \le \sin x \le 1\);
– Là hàm số tuần hoàn với chu kì \(2\pi \), có nghĩa \(\sin (x + k2\pi ) = \sin x\) với \(k \in \mathbb{Z}\);
– Hàm số đồng biến trên mỗi khoảng \(\left( { – \frac{\pi }{2} + k2\pi ;\frac{\pi }{2} + k2\pi } \right)\) và nghịch biến trên mỗi khoảng \(\left( {\frac{\pi }{2} + k2\pi ;\frac{{3\pi }}{2} + k2\pi } \right),k \in \mathbb{Z}\)
– Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ O làm tâm đối xứng.
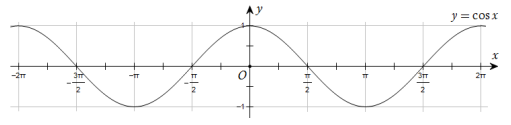
2) Hàm số \(y = \cos x\)
– Tập xác định \({\rm{D}} = \mathbb{R}\), có nghĩa và xác định với mọi \(x \in \mathbb{R}\).
– Tập giá trị \(T = [ – 1;1]\), có nghĩa \( – 1 \le \cos x \le 1\);
– Là hàm số tuần hoàn với chu kì \(2\pi \), có nghĩa \(\cos (x + k2\pi ) = \cos x\) với \(k \in \mathbb{Z}\);
– Hàm số đồng biến trên mỗi khoảng \(( – \pi + k2\pi ;k2\pi )\) và nghịch biến trên mỗi khoảng \((k2\pi ;\pi + k2\pi ),k \in \mathbb{Z}\);
– Là hàm số chã̃n nên đồ thị nhận trục tung làm trục đối xứng.
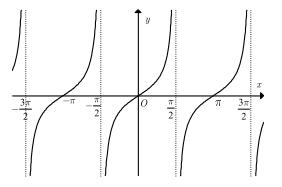
3) Hàm số \(y = \tan x\)
– Tập xác định \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{\pi }{2} + k\pi ,k \in \mathbb{Z}} \right\}\);
– Tập giá trị \(T = \mathbb{R}\);
– Là hàm số tuần hoàn với chu kì \(\pi \), có nghĩa \(\tan (x + k\pi ) = \tan x\) với \(k \in \mathbb{Z}\);
– Hàm số đồng biến trên mỗi khoảng \(\left( { – \frac{\pi }{2} + k\pi ;\frac{\pi }{2} + k\pi } \right),k \in \mathbb{Z}\);
– Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ O làm tâm đối xứng.
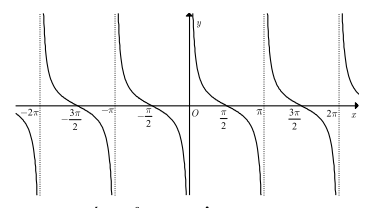
4) Hàm số \(y = \cot x\)
– Tập xác định \({\rm{D}} = \mathbb{R}\backslash \{ k\pi ,k \in \mathbb{Z}\} \);
– Tập giá trị \(T = \mathbb{R}\);
– Là hàm số tuần hoàn với chu kì \(\pi \), có nghĩa \(\tan (x + k\pi ) = \tan x\) với \(k \in \mathbb{Z}\);
– Hàm số đồng biến trên mỗi khoảng \((k\pi ;\pi + k\pi ),k \in \mathbb{Z}\);
– Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ O làm tâm đối xứng.
B. Phân loại và phưong pháp giải bài tâp
Dạng 1: Tìm tập xác định của hàm số
1. Phương pháp
Để tìm tập xác định của hàm số ta cần lưu ý các điểm sau
– \({\rm{y}} = \sqrt {{\rm{u}}({\rm{x}})} \) có nghĩa khi và chỉ khi \({\rm{u}}({\rm{x}})\) xác định và \({\rm{u}}({\rm{x}}) \ge 0\).
– \({\rm{y}} = \frac{{{\rm{u}}({\rm{x}})}}{{{\rm{v}}({\rm{x}})}}\) có nghĩa khi và chỉ \({\rm{u}}({\rm{x}}),{\rm{v}}({\rm{x}})\) xác định và \({\rm{v}}({\rm{x}}) \ne 0\).
– \({\rm{y}} = \frac{{{\rm{u}}({\rm{x}})}}{{\sqrt {{\rm{v}}({\rm{x}})} }}\) có nghĩa khi và chỉ \({\rm{u}}({\rm{x}}),{\rm{v}}({\rm{x}})\) xác định và \({\rm{v}}({\rm{x}}) > 0\).
– Hàm số \({\rm{y}} = \sin {\rm{x}},{\rm{y}} = \cos {\rm{x}}x\) xác định trên \(\mathbb{R}\) và tập giá trị của nó là: \( – 1 \le \sin x \le 1;\quad – 1 \le \cos x \le 1.\)
Như vậy, \({\rm{y}} = \sin [{\rm{u}}({\rm{x}})],{\rm{y}} = \cos [{\rm{u}}({\rm{x}})]\) xác định khi và chỉ khi \({\rm{u}}({\rm{x}})\) xác định.
– \({\rm{y}} = \tan {\rm{u}}({\rm{x}})\) có nghĩa khi và chỉ khi u(x) xác định và \({\rm{u}}({\rm{x}}) \ne \frac{\pi }{2} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\)
– \({\rm{y}} = \cot {\rm{u}}({\rm{x}})\) có nghĩa khi và chỉ khi u(x) xác định và \({\rm{x}} \ne {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\).
2. Các ví dụ mẫu
Ví dụ 1. Tìm tập xác định của các hàm số sau:
a) \(y = \sin \left( {\frac{{5x}}{{{x^2} – 1}}} \right)\);
b) \({\rm{y}} = \cos \sqrt {4 – {{\rm{x}}^2}} \)
c) \(y = \sqrt {\sin x} \)
d) \(y = \sqrt {2 – \sin x} \).
Giải
a) Hàm số \({\rm{y}} = \sin \left( {\frac{{5{\rm{x}}}}{{{{\rm{x}}^2} – 1}}} \right)\) xác định \( \Leftrightarrow {{\rm{x}}^2} – 1 \ne 0 \Leftrightarrow {\rm{x}} \ne \pm 1\).
Vậy \({\rm{D}} = \mathbb{R}\backslash \{ \pm 1\} \).
b) Hàm số \({\rm{y}} = \cos \sqrt {{{\rm{x}}^2} – 4} \) xác định \( \Leftrightarrow 4 – {{\rm{x}}^2} \ge 0 \Leftrightarrow {{\rm{x}}^2} \le 4 \Leftrightarrow – 2 \le {\rm{x}} \le 2\).
Vậy \({\rm{D}} = \{ {\rm{x}} \in \mathbb{R}\mid – 2 \le {\rm{x}} \le 2\} \).
c) Hàm số \({\rm{y}} = \sqrt {\sin {\rm{x}}} \) xác định \( \Leftrightarrow \sin {\rm{x}} \ge 0 \Leftrightarrow {\rm{k}}2\pi \le {\rm{x}} \le \pi + {\rm{k}}2\pi ,{\rm{k}} \in \mathbb{Z}\).
Vậy \(D = \{ x \in \mathbb{R}\mid {\rm{k}}2\pi \le {\rm{x}} \le \pi + {\rm{k}}2\pi ,{\rm{k}} \in \mathbb{Z}\} \).
d) Ta có: \( – 1 \le \sin x \le 1 \Rightarrow 2 – \sin x > 0\).
Do đó, hàm só luôn luôn xác định hay \({\rm{D}} = \mathbb{R}\).
Ví dụ 2. Tìm tập xác định của các hàm số sau:
a) \(y = \tan \left( {x – \frac{\pi }{6}} \right)\)
b) \(y = \cot \left( {x + \frac{\pi }{3}} \right)\);
c) \(y = \frac{{\sin x}}{{\cos (x – \pi )}}\);
d) \(y = \frac{1}{{\tan x – 1}}\).
Giải
a) Hàm số \(y = \tan \left( {x – \frac{\pi }{6}} \right)\) xác định \( \Leftrightarrow x – \frac{\pi }{6} \ne \frac{\pi }{2} + k\pi \Leftrightarrow x \ne \frac{{2\pi }}{3} + k\pi ,k \in \mathbb{Z}\).
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{{2\pi }}{3} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}} \right\}\).
b) Hàm số \(y = \cot \left( {x + \frac{\pi }{3}} \right)\) xác định \[ \Leftrightarrow {\rm{x}} + \frac{\pi }{3} \ne {\rm{k}}\pi \Leftrightarrow {\rm{x}} \ne – \frac{\pi }{3} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\]
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{{ – \pi }}{3} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}} \right\}\).
c) Hàm số \({\rm{y}} = \frac{{\sin {\rm{x}}}}{{\cos ({\rm{x}} – \pi )}}\) xác định \( \Leftrightarrow \cos ({\rm{x}} – \pi ) \ne 0 \Leftrightarrow {\rm{x}} – \pi \ne \frac{\pi }{2} + {\rm{k}}\pi \Leftrightarrow {\rm{x}} \ne \frac{{3\pi }}{2} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\).
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{{3\pi }}{2} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}} \right\}\).
d) Hàm số \({\rm{y}} = \frac{1}{{\tan {\rm{x}} – 1}}\) xác định \(\tan {\rm{x}} \ne 1 \Leftrightarrow {\rm{x}} \ne \frac{\pi }{4} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\).
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{\pi }{4} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}} \right\}\).
Ví dụ 3. Tìm tập xác định của các hàm số sau:
a) \(y = \cos 2x + \frac{1}{{\cos x}}\);
b) \(y = \frac{{3\cos 2x}}{{\sin 3x\cos 3x}}\).
Giải
a) Hàm số \({\rm{y}} = \cos 2{\rm{x}} + \frac{1}{{\cos {\rm{x}}}}\) xác định \( \Leftrightarrow \cos {\rm{x}} \ne 0 \Leftrightarrow {\rm{x}} \ne \frac{\pi }{2} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}\).
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{\pi }{2} + {\rm{k}}\pi ,{\rm{k}} \in \mathbb{Z}} \right\}\).
b) Hàm số \(y = \frac{{3\cos 2x}}{{\sin 3x\cos 3x}}\)
xác định \( \Leftrightarrow \) \(\sin 3x\cos 3x \ne 0 \Leftrightarrow \frac{1}{2}\sin 6x \ne 0 \Leftrightarrow 6x \ne k\pi \Leftrightarrow x \ne \frac{{k\pi }}{6},k \in \mathbb{Z}\)
Vậy \({\rm{D}} = \mathbb{R}\backslash \left\{ {\frac{{{\rm{k}}\pi }}{6},{\rm{k}} \in \mathbb{Z}} \right\}\).
Xem thêm